This notebook intends to demonstrate how to use a vanilla transformer encoder to do computer vision tasks. This model will be trained on the classic Fashion MNIST dataset, and the implementation follows the original ViT paper.
Data Setup
To start, lets get the necessary imports and data setup with a mapping from class names to class values.
Next we’ll define our model. The model will be a standard transformer encoder, but some tweaks need to be made to handle computer vision tasks. First we’ll need to create a position encoder, which was borrowed from a common implementation freely available based on the original transformer paper. For simplicity, we’ll also create a MLP block, which is a simple linear layer followed by a non-linear activation.
The implementation of a Vision Transformer requires these steps,
Project each image patch into an embedding space through an MLP
Add a new “classification token” to the input sequence, which is an embedding of all ones to start
This classification token will be transformed into an embedding containing the relevant information needed to determine the class of the image
Add position encodings to each patch
Feed the patches into the encoder, applying the attention mechanism and projections along the way
The attention is not masked as all patches need to be compared and referenced among one another
After passing through the transformer layers, the transformed classification token is then put through a 3 layer MLP that will then classify the sequence
Some utility functions and processing steps are added to simplify calling the model externally.
Code
class PositionalEncoding(nn.Module):def__init__(self, d_model: int, dropout: float=0.1, max_len: int=5000):super().__init__()self.dropout = nn.Dropout(p=dropout) position = torch.arange(max_len).unsqueeze(1) div_term = torch.exp(torch.arange(0, d_model, 2) * (-math.log(10000.0) / d_model)) pe = torch.zeros(max_len, 1, d_model) pe[:, 0, 0::2] = torch.sin(position * div_term) pe[:, 0, 1::2] = torch.cos(position * div_term)#pe = pe.unsqueeze(0).transpose(0, 1) pe = torch.squeeze(pe)self.register_buffer('pe', pe)def forward(self, x):""" Arguments: x: Tensor, shape ``[seq_len, batch_size, embedding_dim]`` """ x = x +self.pereturnself.dropout(x)class LinearLayer(nn.Module):def__init__(self, in_size, out_size):super().__init__()self.linear = nn.Linear(in_size, out_size)self.act = nn.GELU()def forward(self, x):returnself.act(self.linear(x))class VisionTransformer(nn.Module):def__init__(self, token_size, embedding_size, n_layers, n_classes):super().__init__()self.input_linear = nn.Linear(token_size, embedding_size) encoder_layer = nn.TransformerEncoderLayer(d_model=embedding_size, activation='gelu', batch_first=True, nhead=8, dim_feedforward=64)self.transformer_encoder = nn.TransformerEncoder(encoder_layer, num_layers=n_layers) mlp = [LinearLayer(embedding_size, embedding_size) for _ inrange(3)] mlp.append(nn.Linear(embedding_size, n_classes))self.output_layer = nn.ModuleList(mlp)self.pe = PositionalEncoding(embedding_size, max_len=50)def __chip_image(self, image, chip_size=4): image_shape = torch.tensor(image.shape[-2:]) num_chips = image_shape // chip_size chipped_out_images = torch.empty((*image.shape[:-2], int(torch.prod(num_chips).item()), chip_size, chip_size)) count =0for row inrange(num_chips[0]):for col inrange(num_chips[1]): r = row*chip_size c = col*chip_size chipped_out_images[:, :, count] = image[:, :, r:r+chip_size, c:c+chip_size] count +=1return chipped_out_imagesdef forward(self, x): x =self.__chip_image(x).to(x.device) x = torch.squeeze(x.reshape((*x.shape[:3], -1))) x =self.input_linear(x) new_x = torch.ones(x.shape[0], x.shape[1]+1, x.shape[2], device=x.device)/5 new_x[:, 1:] = x x = new_x x =self.pe(x) x =self.transformer_encoder(x)for layer inself.output_layer: x = layer(x)return x[:, 0]
Training
Training the model involves a standard training setup. Here are the hyperparameters,
Number of Epochs = 10
Learning rate = 5e-4
Embedding Dimension = 64
Number of Attention Layers = 3
Optimizer = Adam
Loss function = Cross Entropy
Code
num_epochs =20model = VisionTransformer(16, 64, 3, 10)device ="cuda:0"model = model.to(device)criterion = nn.CrossEntropyLoss()optimizer = torch.optim.Adam(model.parameters(), lr=5e-4)print(f"Number of model parameters: {sum(p.numel() for p in model.parameters() if p.requires_grad)}")train_losses = []test_losses = []with Progress() as prog: epoch_task = prog.add_task("[red] Epoch", total=num_epochs)for epoch inrange(num_epochs): train_task = prog.add_task("[blue] Train", total=len(train_loader)) test_task = prog.add_task("[green] Test", total=len(test_loader)) train_loss =0.0 test_loss =0.0 train_count =0 test_count =0for x, y in train_loader: x = x.to(device) y = y.to(device) optimizer.zero_grad() predictions = model(x) loss = criterion(predictions, y) loss.backward() optimizer.step() train_loss += loss.item() train_count += x.shape[0] prog.update(train_task, advance=1, description=f"[blue] Train Loss: {train_loss/train_count:.3e}") train_losses.append(train_loss/train_count)with torch.no_grad():for x, y in test_loader: x = x.to(device) y = y.to(device) predictions = model(x) loss = criterion(predictions, y) test_loss += loss.item() test_count += x.shape[0] prog.update(test_task, advance=1, description=f"[green] Test Loss: {test_loss/test_count:.3e}") test_losses.append(test_loss/test_count) prog.remove_task(train_task) prog.remove_task(test_task) prog.update(epoch_task, advance=1)
/home/jon/projects/ml_demos/ml_demos/demos/venv/lib/python3.13/site-packages/rich/live.py:231: UserWarning:
install "ipywidgets" for Jupyter support
/home/jon/projects/ml_demos/ml_demos/demos/venv/lib/python3.13/site-packages/torch/nn/modules/linear.py:125:
UserWarning:
Attempting to use hipBLASLt on an unsupported architecture! Overriding blas backend to hipblas (Triggered
internally at /pytorch/aten/src/ATen/Context.cpp:310.)
Number of model parameters: 89866
Evaluate the model
Evaluating the model can proceed in several steps. First we can look at the loss plot to hint at model convergence. Here we can see the train and test loss values follow one another well. It does seem to indicate that at around epoch 7, overfitting may begin as the lines begin to diverge. The train loss is still trending downwards, while the test loss seem to have approached an asymptote.
Code
epochs = [i for i inrange(num_epochs)]fig = go.Figure()fig.add_trace(go.Scatter(x=epochs, y=train_losses, mode="lines+markers", name="Train"))fig.add_trace(go.Scatter(x=epochs, y=test_losses, mode="lines+markers", name="Test"))fig.update_xaxes(title_text="Epoch")fig.update_yaxes(title_text="Loss")fig.show()predictions = []truth = []with torch.no_grad():for x, y in test_loader: x = x.to(device) p = model(x) preds = torch.argmax(p, dim=1) predictions.extend(preds.flatten().cpu()) truth.extend(y)
Next lets look at the classic classification metrics of: Precision, Recall and F1
Overall the metrics indicate that the model is performing fairly reasonably. Most of the classes have F1 scores 0.75 or more. The classes that seemed to struggle more were,
Shirt
Pullover
Coat
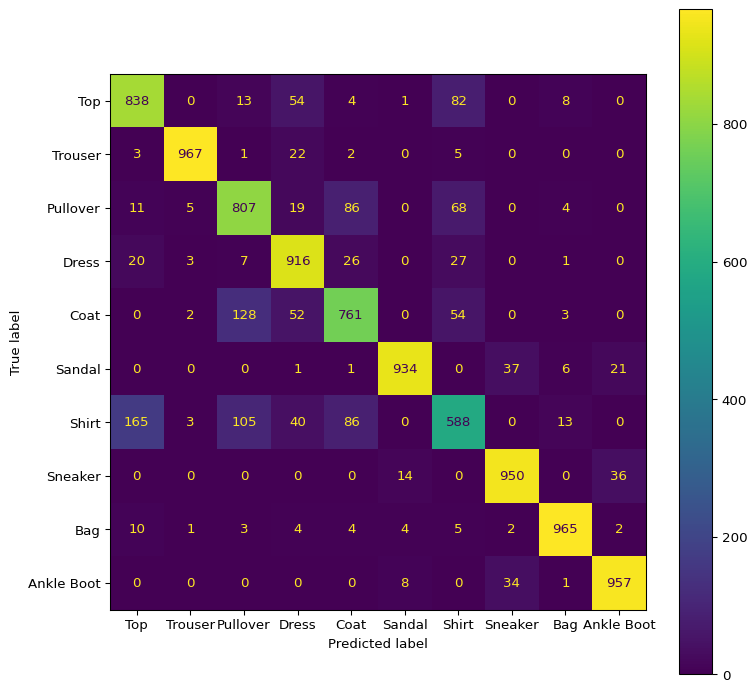
Intriguing that these were the lower performing classes, as these classes are similar to one another conceptually and visually. To determine if the model is indeed confusing these classes, the confusion matrix may provide more insight.
The confusion matrix does indeed seem to allude to the idea that the model is confusing the three classes with one another. We can see that the largest off-diagonal values in the confusion matrix are these values intersections.
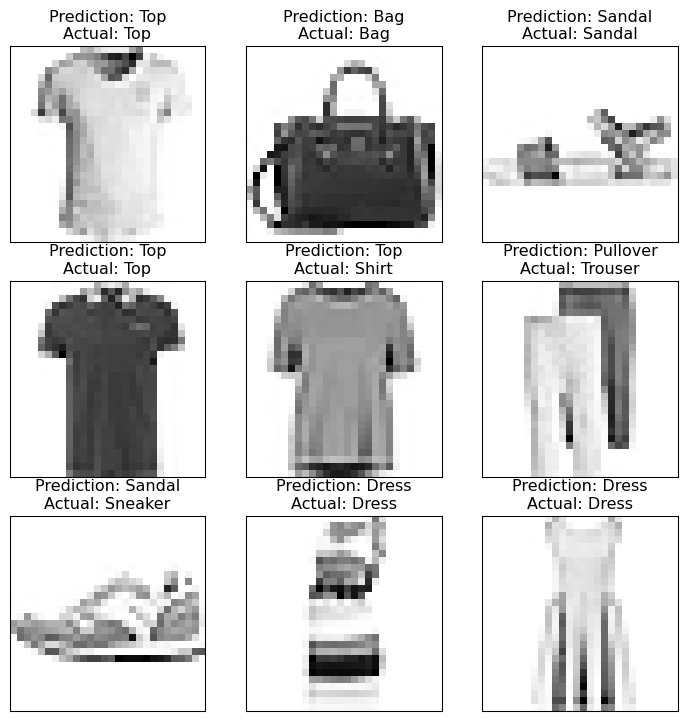
Finally let’s grab a few random samples from the test set and visualize them with the models predictions vs the truth values.
Code
num_samples =9fig, ax = plt.subplots(3, 3, figsize=(9, 9))test_sample =next(iter(test_loader))[:num_samples]test_predictions = torch.argmax(model(test_sample[0].to(device)), dim=1)row =0col =0for i inrange(num_samples): ax[row, col].imshow(test_sample[0][i][0], cmap="Greys") ax[row, col].set_title(f"Prediction: {class_dict[int(test_predictions[i])]}\nActual: {class_dict[int(test_sample[1][i])]}") ax[row, col].set_xticks([]) ax[row, col].set_yticks([]) col +=1if col >2: row +=1 col =0#plt.savefig("test_examples.png")plt.show()